يدُ روبوت تُحقّق المستحيل
رغم التّطوّر الّذي يشهده قطاع الرّوبوتات، إلّا أّنّ بعض عناصره تبقى بعيدةً عن الواقع بعض الشّيء. وتشكّل أيادي الروبوتات تحدّيًا للعلماء من أجل جعلها أكثر ليونة.
وتحوّل علماء الكمبيوتر إلى التّعلّم الآليّ، وهو مجال الذّكاء الاصطناعيّ (AI) الذّي تُبني فيه الحواسيب المهارات بمفردها.
واقِعٌ محقّق
مثل هذا التّعلّم يستغرق بعض الوقت والتّكرار، إلّا أنّ أجهزة الرّوبوت تبقى بطيئةً وقابلةً للكسر. بدلاً من ذلك، يقوم بعض الباحثين بتدريب ما يُعرف بالـ"Algorithms" باستخدام الرّوبوتات الافتراضيّة، لكن يبقى الاختلاف البسيط بين الافتراضيّ والواقع المُعضلة الأساسيّة.
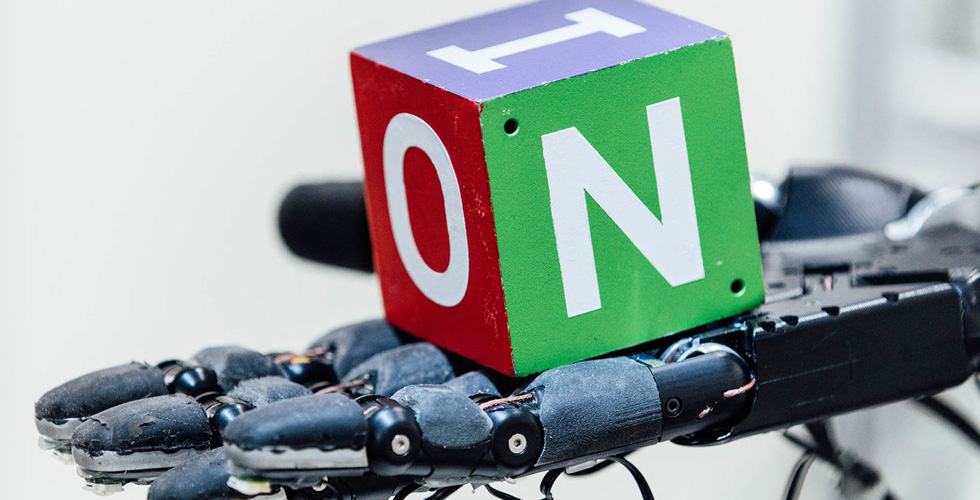
تغلّب العمل والخطوات الجديدة على هذه المُعضلة من خلال إضافة بعض العناصر أثناء التّدريب، مثل الاحتكاك وحجم الكائن. وتمّ إنجاز معظم الأعمال، في كلٍّ من المحاكاة والواقع عبر مكعّبٍ يحمل أحرفًا على جوانبه. وأعطى العلماء البرنامج ذاكرةً قصيرة، ممّا يساعد الرّوبوت على إحساس حجم الكتلة المحدّد وعوامل أخرى.
نجاحٌ بعد فشل
استخدم الباحثون "Hand Shadow Dexterous Hand"، الّذي يشبه اليد البشريّة، مُعلّقًا على الجدار. وتمّ توجيه اليد للتّلاعب بالمكعّب في سلسلةٍ من التوجّهات، ويُعدّ التّمرين من أصعب التّمارين الّتي لم يقُم بها أيّ روبوت على الإطلاق.
في العالم الحقيقيّ، قام النّظام "بمشاهدة" المكعّب باستخدام ثلاث كاميراتٍ موضوعة فوق اليد. أدّت اليد الافتراضيّة، بعد ما يعادل 100 سنة من ممارسة التّجربة والفشل بتحقيق المُبتغى، بتحريك المكعّب في عدّةٍ اتّجاهاتٍ دون إسقاطه. كما اكتشف نظام "Dactyl"، حيلًا بشريّةً شائعةً مثل غزل المكعّب بين إصبعين أو الاستفادة من الجاذبيّة لتحريك المكعّب.
وقد يحسّن هذا التّقدّم من عمليّة جمع القطع الإلكترونيّة الحسّاسة أو الرّعاية الصّحيّة أو تطوير الرّوبوتات للمساعدة في الأعمال المنزليّة.



